اهداف:روش ساخت یک ایربوت رادیو کنترل
وسایل مورد نیاز: فوم، موتورالکتریکی 12ولت، ملخ، ، قطعات چوب یا پلاستیک، کاتر، چسب حرارتی
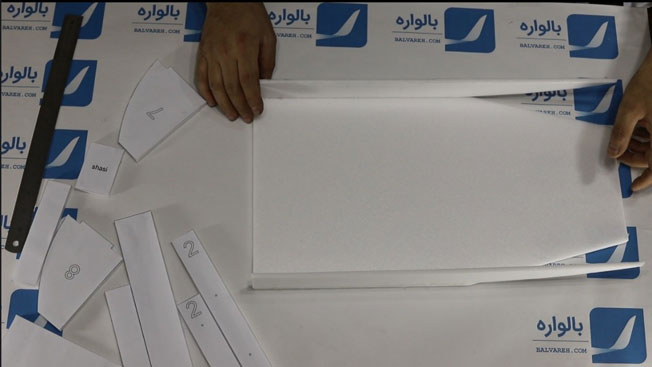
در این جلسه روش ساخت یک ایربوت پیشرفته یا رادیو کنترل را به شما آموزش می دهیم. ابتدا نقشه قطعات بدنه را بر روی یک کاغذ می کشیم و قسمت های مختلف را از روی کاغذ برش زده و بر روی یک فوم قرار می دهیم. سپس همین با استفاده از شابلون کردن نقشه کاغذی بر روی فوم، قطعات بدنه ی ایربوت را از فوم برش می زنیم.
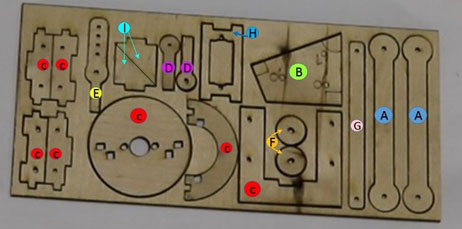
در تصویر فوق قطعات ایربوت شماره گذاری شده اند که هر شماره معرف قطعات قسمتی از بدنه می باشد.
1: کف بدنه ایربوت (قسمت اصلی بدنه)
2: کناره ها (لبه های) بدنه
3: قسمت انتها (عقب) بدنه
4: ستون های بخش کنترل (محل اتصال سکان عمودی)
5: قسمت های افقی نصب شده بر بالا و پایین ستون های بخش کنترل
6: ستون های شاسی نصب موتور
7: سکان های عمودی (رادر)
8: شاسی محل نصب موتور
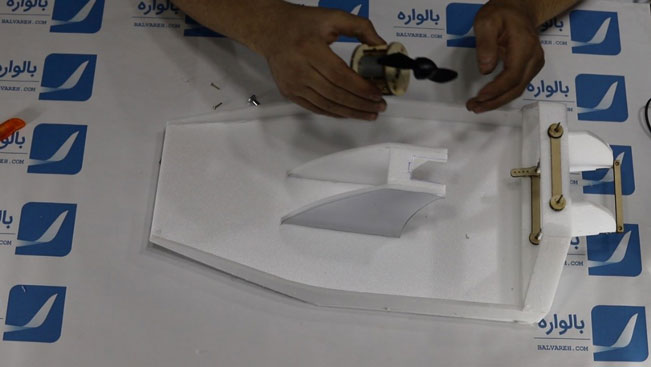
در این مرحله مطابق آنچه در ایربوت ساده انجام دادیم، کناره های بدنه (قسمت های شماره 2) را چسب زده و به بدنه اصلی (شماره1) می چسبانیم. سپس بخش جلویی ایربوت را کمی تا می کنیم تا بالا آمده و به کناره ها بچسبد. سپس قسمت انتهایی بدنه ایربوت (قطعه شماره 3) را در جای خود می چسبانیم.
سپس ستون های شاسی نصب موتور (قطعات شماره 6) را در محل مناسب قرار می دهیم.
سپس شاسی (قطعه شماره8) را بین ستون ها نصب می کنیم.
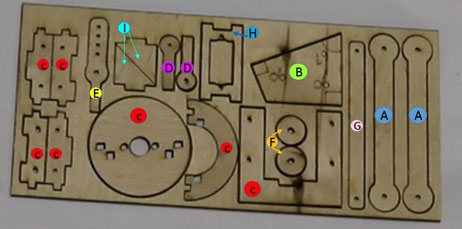
این مرحله بهتر است که از تعدادی قطعات چوبی یا پلاستیکی بریده شده جهت اتصالات کمک بگیریم. ما در بالواره جهت سادگی کار و به علت تولید تعداد بالای ایربوت از قطعات از پیش آماده شده و برش خورده با لیزر استفاده میکنیم، اما شما می توانید ضمن استفاده از پکیج آماده بالواره، در صورت تمایل خودتان از قطعات چوبی یا پلاستیکی استفاده کرده و آنها را مشابه آنچه در زیر می بینید برش دهید. کاربرد هر یک از قطعات نیز در زیر عکس آمده است.
A: قطعات نصب شده بر روی قسمت های افقی بخش کنترل
B: گونیا جهت چک کردن زوایا مطابق نقشه
C: قسمت های سازنده شاسی و قاب موتور
D: قطعات جهت اتصال دو سکان عمودی به یکدیگر
E: قطعه جهت اتصال سکان های عمودی به سروو موتور
F: قطعات جهت تثبیت قسمت افقی بالایی بخش کنترل
G: قطعه جهت اتصال انتهای دو سکان عمودی
H: قطعه اصلی شاسی و محل قرار گرفتن سروو
I: قطعات دو طرف شاسی سروو
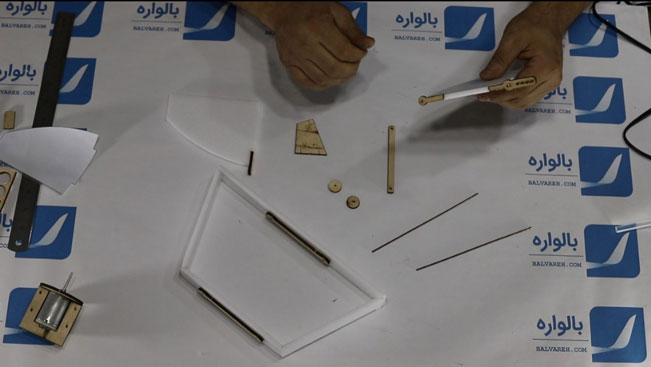
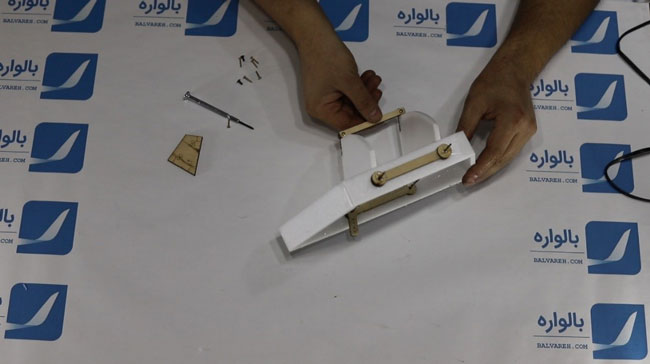
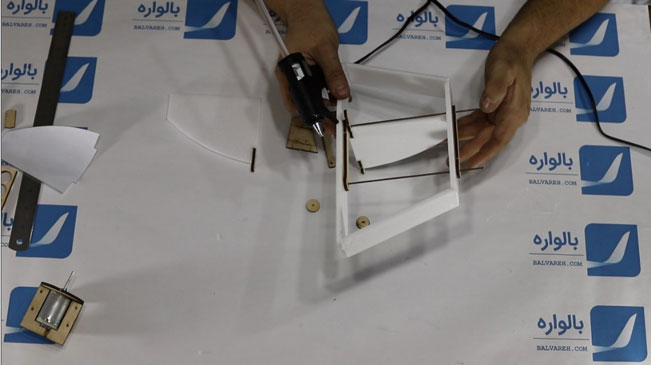
در این مرحله قطعات چوبی مربوط به قسمت افقی بخش کنترل (قطعات A) را در وسط قطعات فومی (قطعات شماره 5) همین بخش نصب می کنیم.
سپس ستون های بخش کنترل (قطعات شماره 4) را بر روی بخش افقی پایین چسبانده و بخش افقی بالا (کوچکتر) را مطابق شکل زیر بر روی ستون ها می چسبانیم.
بهتر است که زوایای تعیین شده از قبل را توسط یک گونیای آماده (قطعه B) چک کنیم تا همه ی زوایا مطابق نقشه باشند. طبیعتا در صورتی که زوایای دو طرف برابر و قرینه نباشد، عملکرد سیستم کنترل دچار اختلال خواهد شد.
سپس با استفاده از قطعات چوبی (C) یک شاسی برای نسب موتور آماده کرده و موتور براش (Brush) 12 ولت را درون آن قرار داده و ثابت می کنیم. در صورتی که از پکیج آماده استفاده نمی کنید، می توانید قطعاتی مشابه قطعات فوق را برش داده یا به هر صورتی که می توانید یک قاب برای موتور درست کنید.
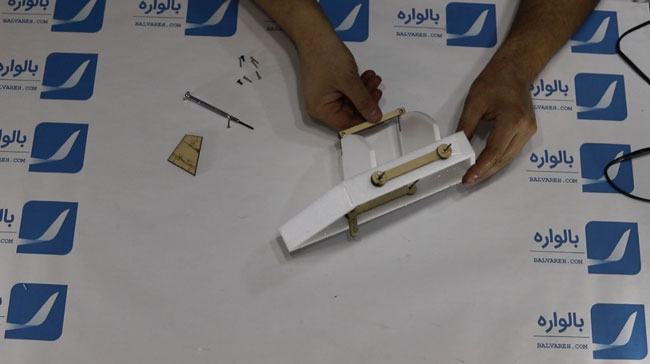
حال باید دو قطعه (D) را جهت اتصال سکان های عمودی به انتهای دو سکان عمودی بچسبانیم. در قسمت یکی از سکان های عمودی که به سروو موتور (servo motor) نزدیکتر است قطعه (E) را نصب می کنیم تا بتوانیم به کمک آن، سکان های عمودی را به سروو موتور متصل کرده و سکان عمودی را کنترل نماییم.
سپس دو میله فلزی از درون قطعات افقی بالا و پایین بخش کنترل عبور داده و سکان های عمودی را به آنها چسبانده و محکم می کنیم.
سپس قطعات F را جهت تثبیت قسمت بالایی بخش کنترل بر روی دو انتهای آن قرار داده و می چسبانیم.
حال از قطعه G جهت اتصال انتهای دو سکان عمودی به منظور حرکت روان و یکسان آنها استفاده می کنیم. بهتر است که این قسمت را به انتهای قطعات D پیچ کنید تا کاملا محکم گردند.
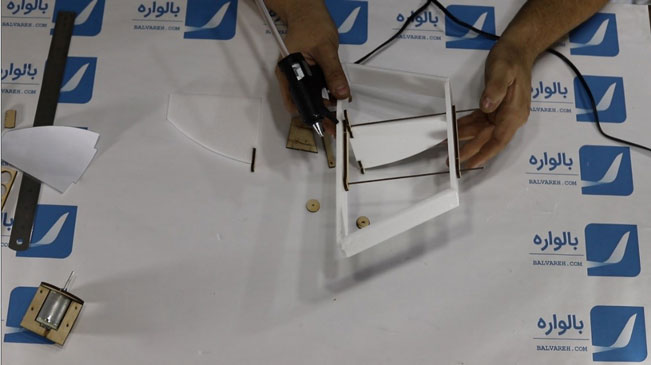
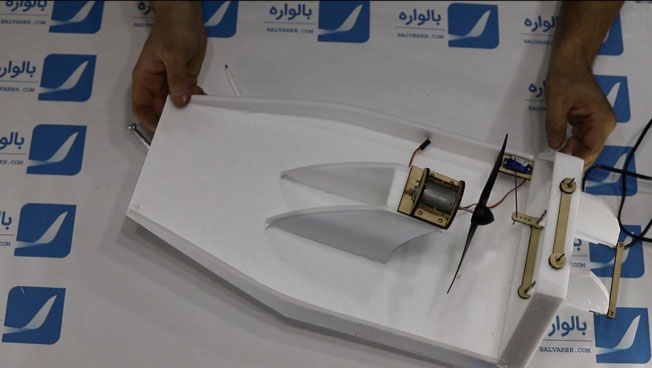
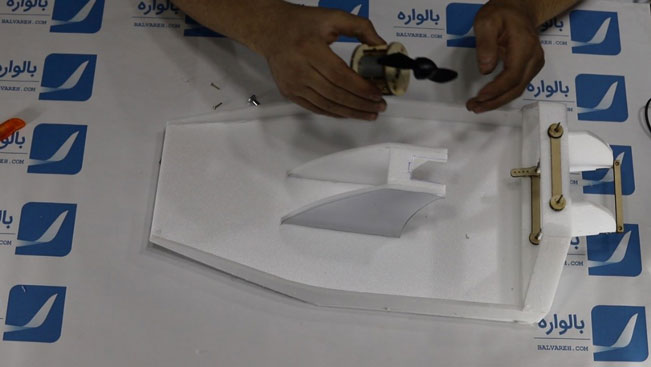
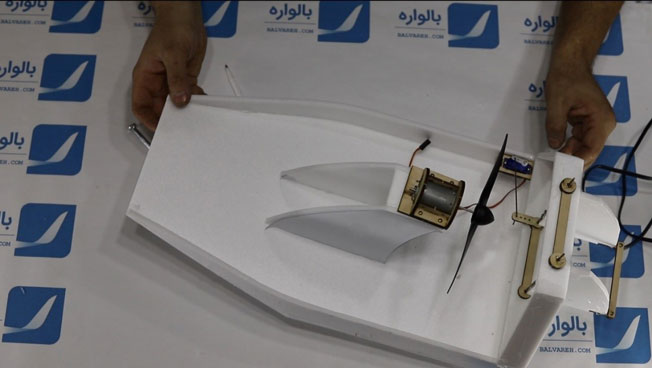
اکنون قسمت کنترل ما کامل شده و آماده نصب میباشد. با استفاده از چسب حرارتی این قسمت را به انتهای بدنه ایربوت متصل می کنیم.
حال ملخ را به موتور متصل کرده، قسمتی از شاسی را که در شکل بالا مشخص شده برس می دهیم تا فضای خالی جهت اتصال موتور آماده شود و در نهایت موتور را متصل می کنیم.
حال سرو را در قطعه H که شاسی سرو میباشد قرار می دهیم. سپس قطعات I را در دو طرف شاسی سروو قرار داده و با استفاده از چسب محکم می کنیم. در نهایت سروو را از طریق یک میله فلزی به قطعه E در انتهای سکان عمودی متصل می کنیم تا امکان حرکت سکان عمودی توسط سروو فراهم گردد.
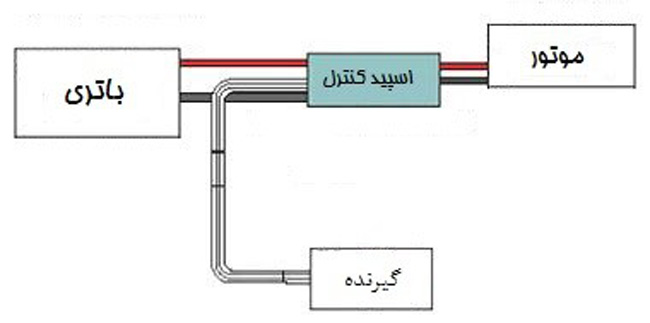
برای پایان کار به چند قطعه دیگر نیاز داریم. یک باتری جهت راه اندازی موتور و به حرکت در آوردن ملخ. یک اسپید کنترل جهت کنترل سرعت چرخش موتور. یک رادیو کنترل که شامل گیرنده و فرستنده می باشد.
اسپید کنترل مخصوص موتورهای براش (که ما برای این ایربوت از این موتور استفاده می کنیم)، عموما به شکل زیر میباشد.
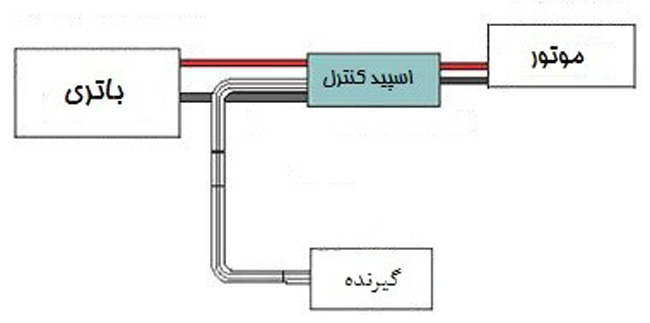
برای اتصال اسپید کنترل به باتری، موتور و گیرنده می توانید از دیاگرام زیر کمک بگیرید.
مطالب مرتبط:ایربوت جلسه اولایربوت جلسه دومایربوت جلسه سومایربوت جلسه چهارمایربوت جلسه پنجمبخش پژوهش های دانش آموزی سایت تبیان