
















موتور الکتریکی و موتورهای الکتریکی DC
موتور کلاسیک DC دارای آرمیچری از آهنربای الکتریکی است...
بازدید :
زمان تقریبی مطالعه :
تاریخ : شنبه 1397/03/12 ساعت 12:06
مرکز یادگیری تبیان - محبوبه همت

موتور الکتریکی
یک موتور الکتریکی، الکتریسیته را به حرکت مکانیکی تبدیل میکند. عمل عکس آن که تبدیل حرکت مکانیکی به الکتریسیته است، توسط ژنراتور انجام میشود. این دو وسیله بجز در عملکرد ، مشابه یکدیگر هستند. اکثر موتورهای الکتریکی توسط الکترومغناطیس کار میکنند، اما موتورهایی که بر اساس پدیدههای دیگری نظیر نیروی الکتروستاتیک و اثر پیزوالکتریک کار میکنند، هم وجود دارند.
ایده کلی این است که وقتی که یک ماده حامل جریان الکتریسیته تحت اثر یک میدان مغناطیسی قرار میگیرد، نیرویی بر روی آن ماده از سوی میدان اعمال میشود. در یک موتور استوانهای ، روتور به علت گشتاوری که ناشی از نیرویی است که به فاصلهای معین از محور روتور به روتور اعمال میشود، میگردد.
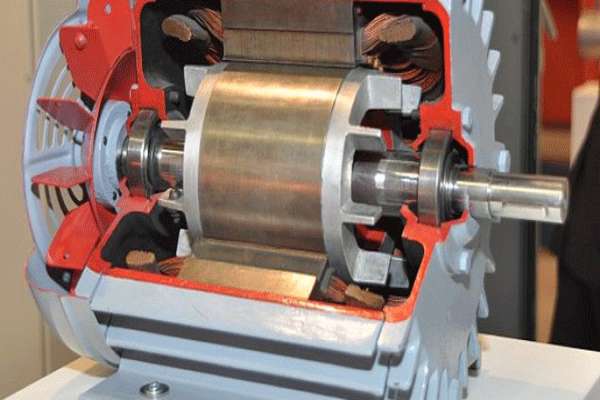
اغلب موتورهای الکتریکی دوارند، اما موتور خطی هم وجود دارند. در یک موتور دوار بخش متحرک (که معمولاً درون موتور است) روتور و بخش ثابت استاتور خوانده میشود. موتور شامل آهنرباهای الکتریکی است که روی یک قاب سیم پیچی شده است. گر چه این قاب اغلب آرمیچر خوانده میشود، اما این واژه عموماً به غلط بکار برده میشود. در واقع آرمیچر آن بخش از موتور است که به آن ولتاژ ورودی اعمال میشود یا آن بخش از ژنراتور است که در آن ولتاژ خروجی ایجاد میشود. با توجه به طراحی ماشین ، هر کدام از بخشهای روتور یا استاتور میتوانند به عنوان آرمیچر باشند. برای ساختن موتورهایی بسیار ساده کیتهایی را در مدارس استفاده میکنند.
موتور کلاسیک DC دارای آرمیچری از آهنربای الکتریکی است. یک سوییچ گردشی به نام کموتاتور جهت جریان الکتریکی را در هر سیکل دو بار برعکس می کند تا در آرمیچر جریان یابد و آهنرباهای الکتریکی، آهنربای دائمی را در بیرون موتور جذب و دفع کنند. سرعت موتور DC به مجموعهای از ولتاژ و جریان عبوری از سیم پیچ های موتور و بار موتور یا گشتاور ترمزی، بستگی دارد.
سرعت موتور DC وابسته به ولتاژ و گشتاور آن وابسته به جریان است. معمولاً سرعت توسط ولتاژ متغیر یا عبور جریان و با استفاده از تپها (نوعی کلید تغییر دهنده وضعیت سیم پیچ) در سیمپیچی موتور یا با داشتن یک منبع ولتاژ متغیر، کنترل میشود. بدلیل اینکه این نوع از موتور میتواند در سرعتهای پایین گشتاوری زیاد ایجاد کند، معمولاً از آن در کاربردهای کششی نظیر لوکوموتیوها استفاده میکنند. اما به هرحال در طراحی کلاسیک محدودیتهای متعددی وجود دارد که بسیاری از این محدودیتها ناشی از نیاز به جاروبکهایی برای اتصال به کموتاتور است. سایش جاروبک ها و کموتاتور، ایجاد اصطکاک میکند و هر چه که سرعت موتور بالاتر باشد، جاروبکها میبایست محکمتر فشار داده شوند تا اتصال خوبی را برقرار کنند. نه تنها این اصطکاک منجر به سر و صدای موتور میشود بلکه این امر یک محدودیت بالاتری را روی سرعت ایجاد میکند و به این معنی است که جاروبکها نهایتاً از بین رفته نیاز به تعویض پیدا میکنند. اتصال ناقص الکتریکی نیز تولید نویز الکتریکی در مدار متصل میکند. این مشکلات با جابجا کردن درون موتور با بیرون آن از بین میروند، با قرار دادن آهنرباهای دائم در داخل و سیم پیچها در بیرون به یک طراحی بدون حاروبک میرسیم.
مطالب مرتبط:
موتور های بدون جاروبک یا سه فاز (brushless)
موتور الکتریکی جاروبک دار (brushed)
سیم پیچ ها
منبع: roboeq
موتور الکتریکی
یک موتور الکتریکی، الکتریسیته را به حرکت مکانیکی تبدیل میکند. عمل عکس آن که تبدیل حرکت مکانیکی به الکتریسیته است، توسط ژنراتور انجام میشود. این دو وسیله بجز در عملکرد ، مشابه یکدیگر هستند. اکثر موتورهای الکتریکی توسط الکترومغناطیس کار میکنند، اما موتورهایی که بر اساس پدیدههای دیگری نظیر نیروی الکتروستاتیک و اثر پیزوالکتریک کار میکنند، هم وجود دارند.
ایده کلی این است که وقتی که یک ماده حامل جریان الکتریسیته تحت اثر یک میدان مغناطیسی قرار میگیرد، نیرویی بر روی آن ماده از سوی میدان اعمال میشود. در یک موتور استوانهای ، روتور به علت گشتاوری که ناشی از نیرویی است که به فاصلهای معین از محور روتور به روتور اعمال میشود، میگردد.
اغلب موتورهای الکتریکی دوارند، اما موتور خطی هم وجود دارند. در یک موتور دوار بخش متحرک (که معمولاً درون موتور است) روتور و بخش ثابت استاتور خوانده میشود. موتور شامل آهنرباهای الکتریکی است که روی یک قاب سیم پیچی شده است. گر چه این قاب اغلب آرمیچر خوانده میشود، اما این واژه عموماً به غلط بکار برده میشود. در واقع آرمیچر آن بخش از موتور است که به آن ولتاژ ورودی اعمال میشود یا آن بخش از ژنراتور است که در آن ولتاژ خروجی ایجاد میشود. با توجه به طراحی ماشین ، هر کدام از بخشهای روتور یا استاتور میتوانند به عنوان آرمیچر باشند. برای ساختن موتورهایی بسیار ساده کیتهایی را در مدارس استفاده میکنند.
موتور کلاسیک DC دارای آرمیچری از آهنربای الکتریکی است. یک سوییچ گردشی به نام کموتاتور جهت جریان الکتریکی را در هر سیکل دو بار برعکس می کند تا در آرمیچر جریان یابد و آهنرباهای الکتریکی، آهنربای دائمی را در بیرون موتور جذب و دفع کنند. سرعت موتور DC به مجموعهای از ولتاژ و جریان عبوری از سیم پیچ های موتور و بار موتور یا گشتاور ترمزی، بستگی دارد.
سرعت موتور DC وابسته به ولتاژ و گشتاور آن وابسته به جریان است. معمولاً سرعت توسط ولتاژ متغیر یا عبور جریان و با استفاده از تپها (نوعی کلید تغییر دهنده وضعیت سیم پیچ) در سیمپیچی موتور یا با داشتن یک منبع ولتاژ متغیر، کنترل میشود. بدلیل اینکه این نوع از موتور میتواند در سرعتهای پایین گشتاوری زیاد ایجاد کند، معمولاً از آن در کاربردهای کششی نظیر لوکوموتیوها استفاده میکنند. اما به هرحال در طراحی کلاسیک محدودیتهای متعددی وجود دارد که بسیاری از این محدودیتها ناشی از نیاز به جاروبکهایی برای اتصال به کموتاتور است. سایش جاروبک ها و کموتاتور، ایجاد اصطکاک میکند و هر چه که سرعت موتور بالاتر باشد، جاروبکها میبایست محکمتر فشار داده شوند تا اتصال خوبی را برقرار کنند. نه تنها این اصطکاک منجر به سر و صدای موتور میشود بلکه این امر یک محدودیت بالاتری را روی سرعت ایجاد میکند و به این معنی است که جاروبکها نهایتاً از بین رفته نیاز به تعویض پیدا میکنند. اتصال ناقص الکتریکی نیز تولید نویز الکتریکی در مدار متصل میکند. این مشکلات با جابجا کردن درون موتور با بیرون آن از بین میروند، با قرار دادن آهنرباهای دائم در داخل و سیم پیچها در بیرون به یک طراحی بدون حاروبک میرسیم.
مطالب مرتبط:
موتور های بدون جاروبک یا سه فاز (brushless)
موتور الکتریکی جاروبک دار (brushed)
سیم پیچ ها
منبع: roboeq