
















سنسورهای اولتراسونیک سنسورهای اولتراسونیک یا حسگرهای مافوق صوت از جمله پرمصرف ترین سنسورها در رباتیک می باشند.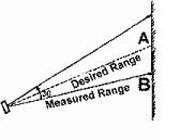
با وجود اینكه رویكردهای زیادی در این زمینه وجود دارد ولی می توان آنها را در دو بخش تقسیم بندی كرد:
دسته اول شامل ابزارهای انفعالی می باشند ،نظیر سیستمهای فاصله سنجی swept-focus و یا stereoscopic
دسته بعد سیستم های فعال یا Active می باشند نظیر سیستمهای ماكروویو ، لیزر و مافوق صوت.
این سنسورها از دو قسمت تشكیل شده است.
قسمت اول مدار راه انداز آن را تشكیل می دهد و قسمت دیگر دو قطعه (مبدل) گیرنده و فرستنده آن، دقیقا مشابه آن قسمت از دزدگیرهایی كه در خودروها (مقابل شیشه جلو) نصب می شود.
دردسر اصلی كار با اینگونه سنسورها مدار راه انداز آن است البته پكیجهای آماده كه كار را بسیار ساده می كنند نیز وجود دارد، مانند مدول مافوق صوت ساخت شركت Texas Instruments .
این سنسورها در برخی دوربینها نیز برای تشخیص فاصله و فوكوس مناسب استفاده می شود
مكانیزم كلی كار این سنسورها ، فرستادن یك بیم و دریافت انعكاس آن و متعاقبا محاسبه زمان رفت و برگشت. بدین ترتیب می توان فواصل را نیز براحتی با در نظر گرفتن سرعت صوت در دما و فشار محیط ، محاسبه كرد.
قدم بعدی بدست آوردن ماتریسی از موانع موجود در محیط است. این كار از دو راه ممكن است :

راه اول جاروب كردن محیط با امواج بصورت مكانیكی می باشد. راه دوم استفاده ازچند مبدل ، با توجه به پیچیدگی محیط ، است.
بعنوان مثال می توان یك مبدل متحرك با رنج زاویه ای بالا در سر ربات ، یك مبدل ثابت در جلو و رو به پایین برای تشخیص گودی، و دو مبدل با زاویه های 45 درجه در چپ و راست را بعنوان یك تركیب مناسب استفاده كرد.یكی از مهمترین خطاهایی كه در این سنسورها مشاهده می شود ، خطای بالقوه در فواصل زیاد است. همانطور كه می دانید امواج مافوق صوت را نمی توان همانند یك بیم لیزر تا باند و انعكاس آن را ثبت كرد. بعنوان مثال در فاصله حدودا 4.5 متری و با زاویه تابش 75 درجه حدود 250 میلیمتر خطا ممكن است پیش آید.
برخی از محققین با استفاده از تیوپها ، شیپوره ها و بازتابنده ها و با فوكوس دادن بیم های صوتی سعی در كم كردن زاویه تابش داشته اند ولی تجهیزات مورد نیاز ابعاد سنسور را به ده ها برابر افزایش می دهد. دقت این نوع سنسورها را با افزایش دقت گیرنده نیز می توان افزایش داد. لبه های كناری بیم عموما از شدت كمتری برخوردارند لذا با كم كردن شدت حساسیت گیرنده می توان خطا را تا نصف كاهش داد. البته در مواردی از یك آرایه از داده ها استفاده می شود و پروسسوری وظیفه تشخیص زاویه مناسب را برعهده دارد.
ادامه دارد...
منبع: میکرورایانه
تنظیم برای تبیان: سیدخاموشی